Любая технология появляется, когда на неё возникает социальный заказ. Идея искусственных слуг, помогающих человеку в быту, впервые появилась ещё в античности. Гораздо позднее возникла идея андроидов — механизмов, имитирующих облик и движения людей. Но даже паровые машины XIX столетия не могли заменить человека. Время настоящих роботов началось в эпоху электричества.
Эра дистанционного управления
В начале ХХ века футурологи верили, что в грядущей мировой войне сражаться будут дистанционно управляемые боевые машины, а их водители смогут находиться на безопасном расстоянии от поля боя. Поверить в это их заставили обещания инженеров: так, в 1898 году Никола Тесла продемонстрировал миниатюрную лодку, управляемую по радио.
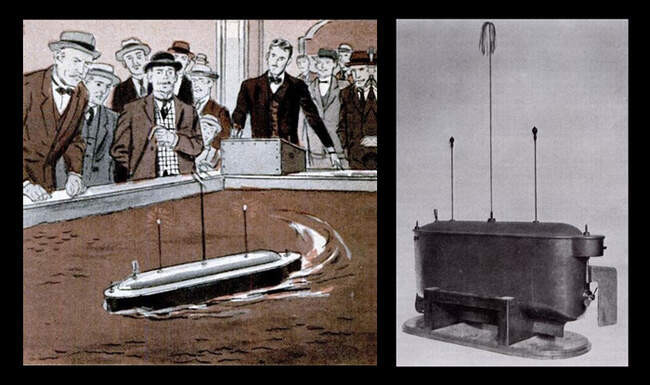 Никола Тесла создал первую телеуправляемую лодку
Никола Тесла создал первую телеуправляемую лодку
Как часто бывает, футурологи ошиблись с масштабами. Но военные «роботы» действительно появились в Первую мировую. В 1915 году в состав немецкого флота приняли взрывающиеся катера Fernlenkboot, построенные по проекту фирмы Siemens & Halske. Некоторыми из них управляли по электропроводам длиной около 20 миль, другими — по радио. Наиболее успешным применением катеров стала атака на британское судно «Эребус» в 1917 году.
Кроме того, доктор Вильгельм фон Сименс разработал для немецкой авиации телеуправляемую планирующую торпеду, которая должна была сбрасываться с дирижабля, но дальше испытаний дело не пошло. Тогда же, весной 1917 года, совершил первый полёт и радиоуправляемый беспилотный аэроплан Aerial Target, построенный под руководством английского физика Арчибальда Лоу.
В 1920-е годы инициативу перехватили советские инженеры: появилось Особое техническое бюро, которое возглавил Владимир Бекаури. Оно создавало системы дистанционного управления для бомбардировщиков «ТБ-1» и «ТБ-3». Но задача оказалась слишком сложной: в первый и последний раз телеуправляемый бомбардировщик «Торпедо» взлетел только в 1942 году. Помимо самолётов, Бекаури разрабатывал телеуправляемый катер и телетанки «ТТ-26». Последние даже использовались в ходе Зимней войны с Финляндией и в начале Великой Отечественной. Впрочем, они показали низкую эффективность и были сняты с вооружения.
Немецким войскам тоже не помогли ни самоходная мина Goliath, ни крылатый самолёт-снаряд V-1, ни баллистическая ракета V-2. Все эти образцы «чудо-оружия» можно отнести к первым примерам серийной роботехники. Но они оказались несвоевременными и не столько наносили урон противнику, сколько пожирали ресурсы.
 Британский тренировочный дрон-мишень Queen Bee, созданный в 1935 году
Британский тренировочный дрон-мишень Queen Bee, созданный в 1935 году
Впрочем телеуправляемые системы применялись не только в военном деле. Если полистать журналы 1930-х годов, можно увидеть, что телеуправлению собирались доверить все сферы жизни: энергетику, транспорт, промышленность, сельское хозяйство. И, конечно, научные исследования — ведь механизмы могли проникнуть туда, где человек не может находиться без риска для жизни.
Наибольшее распространение системы дистанционного управления получили в космонавтике. Все спутники, межпланетные аппараты, грузовые и пилотируемые корабли так или иначе управляются с Земли. Настоящим прорывом стали в 1970-х годах советские «Луноходы», успех которых в наше время развили американские марсоходы Spirit, Opportunity и Curiosity. А в 2013 году и китайцы успешно доставили на Луну свой аппарат «Юйту».
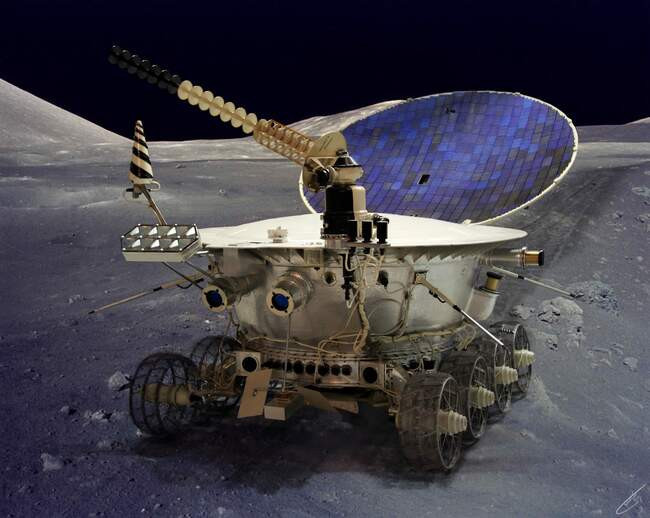 Телеуправляемые планетоходы продолжают изучать Луну и Марс
Телеуправляемые планетоходы продолжают изучать Луну и Марс
На основе планетоходов были разработаны самоходные роботы, способные выполнять задания в зонах радиационного заражения. В ликвидации последствий Чернобыльской аварии участвовали роботизированные комплексы. Сегодня аналогичные системы используются в хранилищах радиоактивных отходов.
Телеуправляемые механизмы распространены и в авиации. Беспилотные летательные аппараты вошли в серийное производство сначала в качестве мишеней, затем — разведчиков. Появление спутниковой навигации расширило возможности дронов: теперь их используют, чтобы искать цели и наносить по ним удары. Наибольших успехов тут добились американцы, на ворружении у которых свыше 11 тысяч дронов.
Самым передовым считается беспилотник Х-47B, способный взлетать с авианосца и дозаправляться в воздухе; причём эти сложные манипуляции он может совершать и без оператора. А простые дроны уже давно доступны обычным людям, которые приобретают их для развлечения, фотовидеосъёмки и доставки небольших грузов.
 Современные боевые дроны могут не только заниматься разведкой, но и атаковать цель
Современные боевые дроны могут не только заниматься разведкой, но и атаковать цель
В подводном деле роботы, управляемые по кабелю или акустическому каналу связи, используются с 1960-х. Первыми здесь стали английские инженеры, построившие подводного сапёра Cutlet. Особую известность приобрёл аппарат Argo, который в 1985 году отыскал обломки «Титаника». Для дальнейших исследований судна построили «блуждающий глаз» — миниатюрный аппарат Jason Junior. В 1995 году японский подводный робот Kaiko установил рекорд, погрузившись в Марианскую впадину на глубину 10 911 метров. В мае 2009 года американский аппарат Nereus, снабжённый оптоволоконным кабелем, попытался нырнуть ещё глубже, но остановился на отметке 10 902 метра.
Конечно, телеуправляемые системы нельзя назвать полноценными роботами: они зависят от человека-оператора. Но они помогают нам исследовать мир и меняют наше отношение к нему. Ведь благодаря этим системам любой, не выходя из дома, может стать исследователем планеты, океана и космоса.
Автопилоты и автоводители
Но бывают ситуации, когда робот должен сам принимать решения. Например, при дальних космических миссиях на управлении сказывается запаздывание сигнала, с чем учёные столкнулись при первых же попытках посадить аппараты на Марс.
Потребность в системах, способных самостоятельно реагировать на изменение обстановки, возникла на заре дальней авиации. Первый простейший автопилот, который мог удерживать курс и высоту полёта, не допуская крена, был построен Лоуренсом Сперри в 1914 году. Как водится, его разработкой заинтересовались военные, и через 15 лет компания Сперри выпустила серийный автопилот для американских ВВС. В то же время автопилоты начали использоваться в судоходстве.
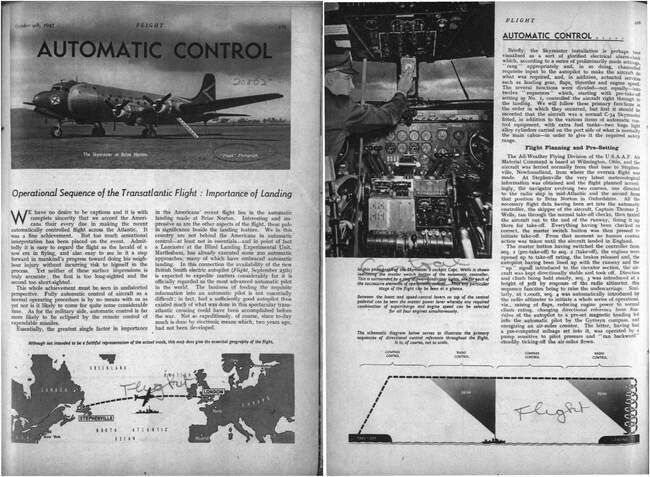 В 1947 году трансатлантический рейс был впервые совершён под полным управлением автопилота
В 1947 году трансатлантический рейс был впервые совершён под полным управлением автопилота
С тех пор автопилоты совершенствовались, забирая у людей всё больше функций. В 1947 году американский военный самолёт С-54 совершил трансатлантический рейс под полным управлением автопилота, включая взлёт и посадку. Понятно, что он не смог бы этого сделать без наземного оборудования, которое поставляло необходимую информацию. По сей день даже самые совершенные автопилоты нуждаются в поддержке наземных и спутниковых систем, помогающих ориентироваться в пространстве, учитывать перемены погоды и воздушную обстановку. Самым ярким примером работы автопилота до сих пор остаётся уникальная посадка космического корабля «Буран» в 1988 году, прошедшая полностью в автоматическом режиме.
Современный автопилот включает мощный компьютер, изготовленный с большим запасом надёжности: например, в составе AFDS-770, устанавливаемого на авиалайнеры «Боинг-777», используются радиационно-устойчивые микропроцессоры FCP-2002, которые подойдут и для космических аппаратов.
И всё же специалисты по безопасности полётов отмечают, что автопилоты привели к новой проблеме: лётчики теряются в случае технического отказа. Привычка полагаться на бортовой компьютер оборачивается катастрофами, которых можно было избежать, понимай пилоты логику работы автопилота в экстремальных режимах. Современный командир воздушного судна должен обладать более обширными знаниями об управлении самолётом, чем его предшественник, полагавшийся лишь на свой опыт.
 Беспилотные автомобили готовятся завоевать рынок. Но будут ли они достаточно безопасны?
Беспилотные автомобили готовятся завоевать рынок. Но будут ли они достаточно безопасны?
Похожие проблемы ожидают и беспилотные автомобили. Первые эксперименты в этой области начались ещё в 1980-е. Результаты в то время оказались скромными, ведь робот-водитель должен не только ориентироваться в пространстве и соблюдать правила, но и мгновенно реагировать на ситуации торможения, сближения, обгона и так далее. Всё это было трудно организовать, пока не появились компьютеры, встроенные радары и информационные сети.
Сегодня же к серийному выпуску беспилотных автомобилей готовятся как известные автопроизводители, так и новички вроде Google и Tesla. Власти Калифорнии даже выдают лицензию на испытание беспилотных автомобилей на своих дорогах. Но эксперты предостерегают, что при массовой эксплуатации возможны необычные аварийные ситуации, а потому пассажир в беспилотном автомобиле должен обладать навыками опытного шофёра, чтобы предотвратить аварию. И зачем тогда вообще роботы-водители?..
Автопилот куда ближе к образу интеллектуальной машины, известному нам по фантастическим книгам и фильмам, чем телеуправляемые аппараты Но он демонстрирует, почему мы ещё далеки от появления по-настоящему автономных роботов. Подчиняясь заложенным программам, автопилот способен работать эффективно в условиях, которые сумели предсказать программисты, но может «пойти вразнос», если условия изменятся. Поэтому ему нужен присмотр квалифицированного специалиста, разбирающегося в том, как работает автопилот.
Умные вещи века
Социальный заказ на роботизацию включает и мечту о доме, где всё, от уборки до выбора вечерней телепередачи, автоматизировано. Вспоминается прекрасный и печальный рассказ Рэя Брэдбери «Будет ласковый дождь», где описано такое «умное» жилище.
Но фактически большая часть работ по дому давно автоматизирована. Ещё в первой половине ХХ века появились пылесосы (1901), тостеры (1909), посудомоечные машины (1913), электроутюги (1927), стиральные машины (1935) и СВЧ-печи (1945). Все они позволяют тратить на быт намного меньше времени, чем приходилось нашим предкам. Современные бытовые приборы достигли такой степени автоматизации, что их можно назвать роботами. Даже дешёвая стиральная машина способна выполнять функции целой прачечной XIX века.
 Роботизированный дом будущего в представлении художника 1960-х годов
Роботизированный дом будущего в представлении художника 1960-х годов
Но под «умным» домом всё же понимают нечто иное. В 1950-е годы появились проекты систем, управляющих целым зданием или квартирой. Наибольшую известность в то время получили Push-Button Manor Эмиля Матиаса, где расположенные по всему дому кнопки автоматизировали выполнение основных бытовых задач, и компьютер Echo IV Джеймса Сазерленда, который регулировал температуру в доме, включал и выключал приборы и распечатывал списки необходимых покупок.
В 1975 году шотландская компания Pico Electronics разработала первый специализированный стандарт управления домашними устройствами — X10. С тех пор появилось несколько других стандартов: EIB, EHS BatiBus, KNX. Главным управляющим центром «умного» дома становится специальное устройство — контроллер. С помощью набора сенсоров он сканирует пространство, чтобы обеспечить безопасность и комфортный микроклимат. Контроллер управляет актуаторами — приборами, которые подключены к сети и работают согласно заданному распорядку. Команды контроллеру можно отдавать как через компьютер или смартфон, так и голосом.
Со временем мы увидим дома, которые, как у Брэдбери, смогут поддерживать быт даже в отсутствие человека. Но вряд ли они кардинально облегчат нашу жизнь. Ведь если ломается один прибор, мы утешаемся тем, что другие работают. А если сломается контроллер или система сенсоров? Налаженный быт мгновенно превратится в ад. Готовы ли мы к подобному «бунту машин»?
Киберкоммунизм
Историк Ричард Барбрук в своей нашумевшей книге «Воображаемое будущее» (2007) обратил внимание на такой парадокс. Несмотря на колоссальный прогресс, за последние полвека кардинально преобразивший мир, представления людей о будущем почти не изменились. Мы всё ещё верим, что картинки из журналов 1960-х станут реальностью.
Один из образов, на который указывает Барбрук и который до сих пор владеет нашим воображением, связан с идеей киберкоммунизма. Её сформулировал в середине 1950-х советский учёный и замминистра обороны Аксель Берг. Он полагал, что электронная сеть может эффективнее управлять экономикой страны, чем свободный рынок или Госплан. А большую часть работ по обеспечению нужд населения собирались передать механическим киберам, находящимся в подчинении этой сети. За счёт высвобождения творческой энергии масс ожидался не только бурный рост экономики, но и практически безграничное расширение человеческих возможностей.
Концепцию киберкоммунизма популяризировал братья Стругацкие в утопической повести «Возвращение (Полдень, XXII век)» (1962). Вот что они писали в отрывке, который не вошёл в итоговый текст:
Многочисленные кибердворники, киберсадовники, киберперевозчики и другие киберы работали на гемомеханическом приводе — у них была мускульная и какое-то подобие кровеносной системы, они питались мусором, который они убирали, ветками, которые они стригли, пылью, через которую они двигались. Органы управления почти всех этих машин не конструировались, не собирались, даже не печатались, а выращивались в готовом виде…
Рутинный умственный труд, управление однообразными процессами, всё, что поддаётся алгоритмированию, изгнано из труда людей. Человек больше не управляет процессами, не делает статистических подсчётов, не рассчитывает новые машины и процессы. Он иногда снисходит до надзирания за управлением, всю статистику и даже выводы из статистики (стандартные, конечно) ведут машины, расчётом новых процессов и механизмов тоже занимаются инженерные машины, человек даёт только идеи.
Как мы видим, пока что из всех планов реализована только электронная сеть. Да и концепция киберкоммунизма выглядит сомнительной с учётом того, как на самом деле роботы интегрируются в общество. Они дают нам новые способы познания и преобразования мира, но остаются лишь высокотехнологичными «костылями», не способными решить ни одной по-настоящему серьёзной проблемы человечества.
 Роботы компании Boston Dynamics стали невероятно популярны в интернете после серии видео с их испытаний
Роботы компании Boston Dynamics стали невероятно популярны в интернете после серии видео с их испытаний
Настоящие андроиды
В современном обществе нет потребности в человекоподобных роботах. Даже для стресс-тестов хватает манекенов. Тем не менее, выполняя социальный заказ, сформулированный ещё в античности, инженеры стремятся создать андроида, который был бы неотличим от человека — не только внешне, но и по движениям, мимике, умению говорить и общаться.
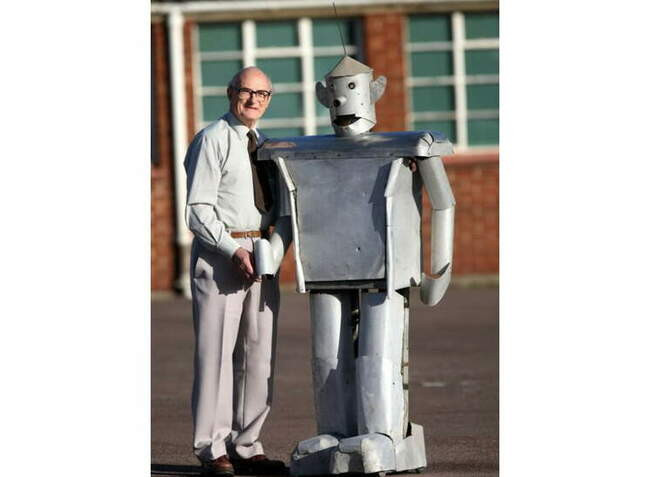 Джордж простоял в гараже Сейла 45 лет, но после замены аккумуляторов снова оказался вполне работоспособным
Джордж простоял в гараже Сейла 45 лет, но после замены аккумуляторов снова оказался вполне работоспособным
Первого мобильного человекоподобного робота в духе фантастических фильмов построил из металлолома английский инженер Тони Сейл в 1949 году. Робот, прозванный Джорджем, мог ходить, садиться, поворачивать голову, поднимать руки, шевелить челюстью и произносить простейшие фразы. При этом он, конечно, не был автономным, а управлялся по радио. Сейчас он выставлен в Национальном музее компьютеров в Блетчли-Парк (Великобритания).
Главной проблемой человекоподобных роботов долгое время оставалась ходьба. С этой трудностью справился в начале 1970-х сербский специалист по биомеханике Миомир Вукобратович: он разработал теоретическую модель движения на двух ногах, а затем построил первый антропоморфный экзоскелет. В те же годы прорыв совершили японские специалисты университета Васэда, представившие робота Wabot-1. Он умел ходить, разговаривать с людьми, а главное — ориентироваться в пространстве с помощью рецепторов, имитирующих глаза и уши. Через десять лет появился Wabot-2 — он, помимо прочего, умел играть на электрооргане.
Успех вдохновил других разработчиков, и японцы вырвались вперёд в андроидостроении. В 2003 году в университета Осаки продемонстрировали робота Actroid с силиконовой кожей, напоминающей человеческую. С тех пор было выпущено несколько моделей серии Repliee, которые выглядели как японки средних лет. Движение нижней части тела у всех моделей ограничено, зато у них развитая мимика, они могут имитировать моргание, дыхание, умеют понимать человеческую речь и адекватно отвечать на вопросы.
 Японских андроидов линейки Repliee издалека можно принять за людей
Японских андроидов линейки Repliee издалека можно принять за людей
А вот американские инженеры создают роботов в основном для военных целей. Первая модель Greenman, сконструированная Центром SPAWAR (Space and Naval Warfare Systems), появилась в 1983 году и представляла собой торс с головой и манипуляторами. Её основной «изюминкой» была система наблюдения, смонтированная на шлеме. Следующим военным роботом стал Manny — он не умел ходить, зато ловко ползал. Наиболее перспективной разработкой SPAWAR считается ROBART III — мобильный боевой робот с пулемётом и сворой миниатюрных разведчиков, которые помогают ему выслеживать цели.
Недавно человекоподобные роботы появились и в космосе. В 2011 году шаттл «Дискавери» доставил на орбиту робонавта R2. Его тело состоит из двух частей: верхняя сделана по образцу человеческого торса, нижнюю же можно менять для решения специальных задач. Сейчас R2 под присмотром космонавтов занимается техобслуживанием внутри МКС; в будущем планируется научить его работать снаружи.
 Робонавт R2 пока ещё немного умеет, но быстро учится
Робонавт R2 пока ещё немного умеет, но быстро учится
А российские разработчики создали робота по имени Фёдор (от Final Experimental Demonstration Object Research). Он довольно подвижен, автономен, подчиняется голосовым командам и даже недавно побывал на МКС.
Конечно, все эти проекты впечатляют. Но, скорее всего, андроиды так и останутся уникальными дорогостоящими игрушками. Даже робота-сиделку или робота-портье куда выгоднее делать не антропоморфными, а функциональными: две руки и две ноги усложняют конструкцию, не давая никаких преимуществ, кроме эстетических.
 Так робот Фёдор готовился к полёту на орбиту
Так робот Фёдор готовился к полёту на орбиту
Попытки создать полноценного андроида, которого не сможет отличить от человека даже эксперт, связаны не с логикой развития роботехники, а с образами из фантастики, на которой воспитывались современные инженеры. Но всё меняется, в том числе и фантастика. Возможно, в будущем проекты андроидов, которые сегодня радуют нас на выставках, будут восприниматься как технический курьёз, вроде аэропланов на паровой тяге или подземных лодок.
Ваша реакция?








Мы думаем Вам понравится
-
![Робопеса от Boston Dynamics научили собирать вещи и сажать растения]()
Робопеса от Boston Dynamics научили собирать вещи и сажать растения
-
![Ученые нашли новый способ делать древесину прозрачной]()
Ученые нашли новый способ делать древесину прозрачной
-
![Умная камера при приближении краснокнижных птиц останавливает турбину ветрогенератора]()
Умная камера при приближении краснокнижных птиц останавливает турбину ветрогенератора
-
![9 современных инноваций, которые как будто пришли из фантастических фильмов]()
9 современных инноваций, которые как будто пришли из фантастических фильмов
-
![Вечные батарейки из ядерных отходов, 3D-принтер, печатающий кожу и др: 7 технических разработок, благодаря которым 2020-й оставит не только негативные воспоминания]()
Вечные батарейки из ядерных отходов, 3D-принтер, печатающий кожу и др: 7 технических разработок, благодаря которым 2020-й оставит не только негативные воспоминания
-
![Надувной электроскутер и еще 5 полезных изобретений, которые подкупают не только назначением, но и внешним видом]()
Надувной электроскутер и еще 5 полезных изобретений, которые подкупают не только назначением, но и внешним видом