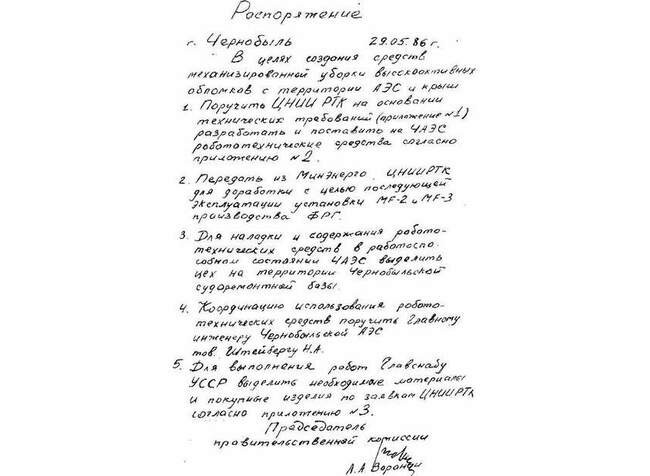
Одной из них стала тема использования роботов при ликвидации последствий катастрофы. Их роль в происходящем кажется эпизодической, хотя в действительности была куда заметнее. Срочно заказанные в ФРГ манипуляторы MF-2 и MF-3 не были рассчитаны на такие дозы излучения и быстро вышли из строя. И тогда к работе подключили специалистов главного робототехнического центра СССР — ленинградского Центрального НИИ робототехники и технической кибернетики (ЦНИИ РТК), уже тогда возглавляемого легендарным Евгением Юревичем. Юревич, которого называют отцом отечественной робототехники, начал с разработки автоматизированной системы мягкой посадки для первых многоместных пилотируемых кораблей «Восход», а в 1968 возглавил собственное ОКБ Технической кибернетики, из которого впоследствии и вырос ЦНИИ РТК. Именно сюда 29 мая 1986 года пришло распоряжение в кратчайшие сроки — к 15 июня — разработать и поставить набор «робототехнических средств для механизированной уборки обломков с территории АЭС».
Разведка на месте
Как нам рассказали в РТК, комплекс получил название «Гамма». Планировалось, что в его состав войдут войти робот-разведчик, робот-подборщик, транспортный робот и пункт управления. Разведчик должен обследовать подлежащую очистке территорию и выяснить радиационную обстановку, после чего робот-подборщик мог приступить к сбору объектов и их погрузке на транспортную машину. Юревич вылетел в Чернобыль.
Изучая обстановку на месте, он непрерывно координировал работу своих коллег в Ленинграде, которые трудились в это время, без преувеличений, круглосуточно, в две 12-часовые смены. В РТК нам пояснили, как был организован процесс: «Сначала главный конструктор уточнял на станции особенности предстоящих работ и соответствующие требования к роботам. По телефону эти данные передавались разработчикам. После обсуждения принимались основные технические решения и определялись сроки поставки очередного робота. Изготовленные роботы доставлялись спецрейсами в Киев».
Работа инженеров на самой станции была организована с помощью сменяющих друг друга команд по 15−20 человек. «В состав экспедиций включались только добровольцы», — подчеркивают в РТК. Размещались в бывшем детском саду, в нескольких десятках километрах от станции, где находился и штаб по ликвидации последствий аварии. Первым сюда прибыл колесный разведчик РР-1, который произвел замеры уровня радиации и снял слишком опасные для людей участки. За несколько дней робот обследовал машинный зал третьего энергоблока и коридор «того самого» четвертого, работая в зонах, где радиация достигала 18 000 Р/ч. Легкие роботы доставлялись на место вручную самими операторами. Однако на кровли, куда людям попасть было невозможно или чересчур опасно, их спускали вертолетами, в фанерных контейнерах, перенося второй конец управляющего кабеля на соседнюю крышу, где их принимали операторы из ЦНИИ РТК.
 На фото — экспериментальный образец РР-1
На фото — экспериментальный образец РР-1
РР-1
Вес: 39 кг, скорость: 0,2 м/с. Проработал: с 17 июня по 4 июля 1986 г. (РР-1), с 27 июня по 6 июля 1986 г. (РР-2).
Колесный робот-разведчик, оснащенный телевизионной камерой и дозиметром для диапазона от 50 до 10000 Р/ч. Управлялся и питался по кабелю. Его дополняла аналогичная машина РР-2, которым на смену пришли модифицированные версии РР-3 и РР-4.
Выход бульдозера
«По результатам этой разведки выяснилось, что данная технология использования роботов непригодна, — рассказали в РТК. — Основной объем первостепенных работ требовал очистки от радиоактивного мусора больших площадей, преимущественно на кровле». Исходя из этого разработчики ЦНИИ РТК изменили направление и начали работу над роботами-бульдозерами. И уже вскоре в Чернобыль стали поступать машины серии ТР.
Управлялись они дистанционно: одни по кабелю, другие — по радиоканалу, и заметно различались по системам защиты и в целом конструкцией. Их создатели впервые столкнулись с подобной задачей, и подбирать оптимальные решения приходилось прямо на ходу. Быстро обнаруживались все новые и новые проблемы — быстрый расход аккумуляторов, ненадежность радиосвязи и электроники в условиях высокой радиации, и они решались шаг за шагом.
Первый бульдозер ТР-А1 использовался для очистки 1500 кв. м кровли деаэраторной этажерки — технического помещения, непосредственно примыкающего к машинному залу АЭС, а позднее применялся для сбрасывания в провал 4-го энергоблока радиоактивного мусора с расположенных над ним кровель. В общей сложности машина проработала около 200 часов чистого времени — куда больше, чем могло бы показаться после просмотра сериала.
У появившегося затем ТР-Б1 аккумуляторы сменил бензиновый генератор с баком на 15 л, который обеспечивал до восьми часов автономной работы. Управлялся он уже по радио, а при необходимости бульдозерный нож можно было снять и заменить дисковой пилой для резки рубероида на крыше. Наконец, уже в августе 186 года к месту аварии прибыли бульдозерные машины ТР-Г1 и ТР-Г2, имевшие повышенную проходимость и предельную радиационную стойкость.
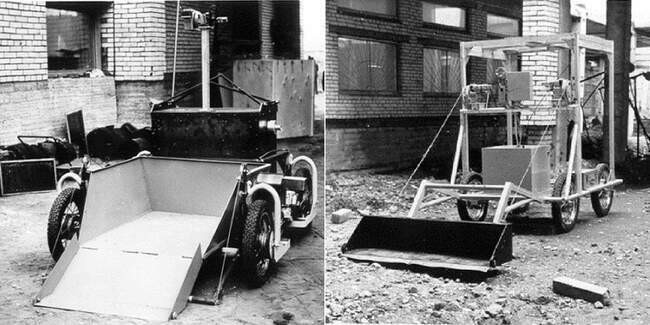 ТР-А1 и ТР-А2
ТР-А1 и ТР-А2
ТР-А1 и ТР-А2 отличались лишь рамой. Вес ТР-А1: 600 кг, грузоподъемность: 200 кг, запас хода: 12 км. Проработал: 200 часов. Тяжелый колесный робот с навесным рабочим инструментом в виде бульдозерного ножа и ковша. Бортовое оборудование: сканирующая телекамера, радиостанция Р-407, две аккумуляторные батареи СЦ-300 со вторичным источником питания, блок управления и переносной пункт управления с кабелем длиной 150 м. Следующий за ним ТР-А2 имел аналогичную конструкцию и отличался лишь рамой для транспортировки и монтажа дождезащитной пленки.
Гусеничная техника
Полупроводники того времени не выдерживали крайних доз радиации, и на роботах ТР-Г все электронные схемы постарались перенести на пункт управления, соединенный с машинами кабелем. Все, что перенести не удалось, заменили надежными релейными схемами, питание подавалось также по силовому кабелю. Вообще, с кабелями инженерам пришлось повозиться отдельно, и на последних поступивших на ЧАЭС роботах появились кабелеукладчики. Благодаря им трос все время оставался слегка натянутым, что исключало наезды на него и зацепления за препятствия.
Не везде могли пробраться и колесные разведчики, так что следующая пара машин (РР-Г1 и РР-Г2) также получила гусеничную платформу. 65-килограммовые роботы могли развивать до 0,3 м/с и позволили обследовать обстановку в самом центре катастрофы — вокруг провала четвертого энергоблока. Доставлять тяжелые машины на рабочие позиции было возможно лишь с помощью вертолетов, и тут снова пришлось потрудиться инженерам.
Они разработали для летчиков телевизионную систему с камерой, которая устанавливалась на тросе у замка крепления груза, и дисплеем в кабине пилота. Процесс напоминал парковку автомобиля с ориентацией на камеры заднего вида — с той разницей, что все происходило в небе над смертельно опасным реактором. «Наиболее опасно было обследование одним из первых роботов-разведчиков бассейна-барботера, непосредственно под взорвавшимся энергоблоком, где мощность излучения достигала 15000 рентген в час, — вспоминал впоследствии Евгений Юревич. — Человек, заглянувший в этот ад, был обречен».
ТР-Г1
Вес: 1400 кг, скорость: 0,12 м/с.
Тяжелый гусеничный робот с навесным рабочим инструментом в виде бульдозерного ножа. Управление и питание — по 200-метровому кабелю.
 Родной брат ТР-Г1 — гусеничный ТР-Г2 «Антошка»
Родной брат ТР-Г1 — гусеничный ТР-Г2 «Антошка»
Конец и новое начало
На ликвидации последствий аварии трудились машины и других робототехнических институтов и предприятий СССР, включая ВНИИТрансмаш, который поставил пару специализированных транспортных СТР — «луноходов», появившихся в том самом сериале. Однако вклад ЦНИИ РТК оказался самым значительным: за два месяца здесь не только модернизировали немецких MF, но и отправили в Чернобыль 15 разведывательных, уборочных и транспортных роботов.
Их служба, начавшаяся в июне 1986 года, закончилась в феврале 1987-го. По оценкам самого Евгения Юревича, они заменили труд нескольких тысяч людей, действуя на самых опасных участках. При ходе ликвидации последствий аварии на ЧАЭС роботы обследовали больше 15000 кв. м станции, ее территории и крыш, и очистили около 5000 кв. м.
В ЦНИИ РТК считают, что эта катастрофа стала трагичной, но важной точкой, с которой ведет начало отечественная экстремальная робототехника — аппараты-разведчики, исследователи, спасатели… Здесь были найдены и отработаны некоторые важные концептуальные решения, реализованные в современных машинах — групповая работа, модульная конструкция и так далее.
Ваша реакция?








Мы думаем Вам понравится
-
![Робопеса от Boston Dynamics научили собирать вещи и сажать растения]()
Робопеса от Boston Dynamics научили собирать вещи и сажать растения
-
![Ученые нашли новый способ делать древесину прозрачной]()
Ученые нашли новый способ делать древесину прозрачной
-
![Умная камера при приближении краснокнижных птиц останавливает турбину ветрогенератора]()
Умная камера при приближении краснокнижных птиц останавливает турбину ветрогенератора
-
![9 современных инноваций, которые как будто пришли из фантастических фильмов]()
9 современных инноваций, которые как будто пришли из фантастических фильмов
-
![Вечные батарейки из ядерных отходов, 3D-принтер, печатающий кожу и др: 7 технических разработок, благодаря которым 2020-й оставит не только негативные воспоминания]()
Вечные батарейки из ядерных отходов, 3D-принтер, печатающий кожу и др: 7 технических разработок, благодаря которым 2020-й оставит не только негативные воспоминания
-
![Надувной электроскутер и еще 5 полезных изобретений, которые подкупают не только назначением, но и внешним видом]()
Надувной электроскутер и еще 5 полезных изобретений, которые подкупают не только назначением, но и внешним видом