Инженеры Калифорнийского университета в Сан-Диего (UCSD) построили робота, похожего на кальмара, который может автономно плавать в воде. В теле робота есть собственный источник энергии. Он также может нести прибор, например, камеру для подводных исследований.
«По сути, мы воссоздали все ключевые особенности, которые кальмары используют для высокоскоростного плавания. Это первый автономный робот, который может генерировать реактивные импульсы для быстрого передвижения, как кальмар, и может достигать этих реактивных импульсов, изменяя форму своего тела, что повышает эффективность плавания», — Майкл Толли, профессор кафедры механической и аэрокосмической техники в UCSD.
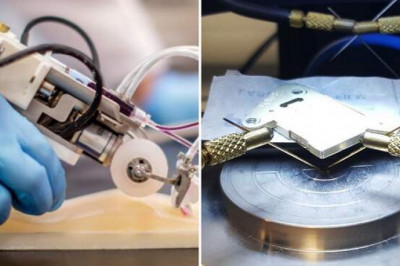
Этот робот-кальмар сделан в основном из мягких материалов, таких как акриловый полимер, с несколькими жесткими деталями, напечатанными на 3D-принтере и вырезанными лазером. Использование мягких роботов в подводных исследованиях важно для защиты рыб и кораллов, которые могут быть повреждены жесткими роботами, отмечают исследователи.
Однако мягкие роботы, как правило, двигаются медленно и испытывают трудности с маневрированием. Исследовательская группа, в которую входят робототехники и специалисты по компьютерному моделированию, а также экспериментальной гидродинамике, обратилась к головоногим моллюскам как к оптимальной модели для решения этих проблем. Например, кальмары могут развивать максимальную скорость среди водных беспозвоночных благодаря механизму реактивного движения.
Разработанный исследователями робот забирает воду в свое тело, сохраняя при этом энергию упругой деформации в гибких ребрах. Затем он высвобождает эту энергию, сжимая свое тело, и генерирует струю воды, чтобы двигаться. В состоянии покоя робот-кальмар имеет форму бумажного фонаря.
Инженеры протестировали робота на испытательном стенде в лаборатории профессора Джено Павляка на кафедре механической и аэрокосмической техники UCSD, а затем поместили в один из аквариумов в Институте океанографии Скриппса.
Испытания продемонстрировали, что робот может маневрировать, регулируя направление сопла. Скорость робота-кальмара составила от 18 до 32 сантиметров в секунду.
Ваша реакция?








Мы думаем Вам понравится
-
![Робопеса от Boston Dynamics научили собирать вещи и сажать растения]()
Робопеса от Boston Dynamics научили собирать вещи и сажать растения
-
![Ученые нашли новый способ делать древесину прозрачной]()
Ученые нашли новый способ делать древесину прозрачной
-
![Умная камера при приближении краснокнижных птиц останавливает турбину ветрогенератора]()
Умная камера при приближении краснокнижных птиц останавливает турбину ветрогенератора
-
![9 современных инноваций, которые как будто пришли из фантастических фильмов]()
9 современных инноваций, которые как будто пришли из фантастических фильмов
-
![Вечные батарейки из ядерных отходов, 3D-принтер, печатающий кожу и др: 7 технических разработок, благодаря которым 2020-й оставит не только негативные воспоминания]()
Вечные батарейки из ядерных отходов, 3D-принтер, печатающий кожу и др: 7 технических разработок, благодаря которым 2020-й оставит не только негативные воспоминания
-
![Надувной электроскутер и еще 5 полезных изобретений, которые подкупают не только назначением, но и внешним видом]()
Надувной электроскутер и еще 5 полезных изобретений, которые подкупают не только назначением, но и внешним видом